
New Open Access journal publication: “6D Object Localization in Car-Assembly Industrial Environment”
A. Papadaki and M. Pateraki published a new peer-reviewed FELICE publication in the Journal of Imaging titled ‘6D Object Localization in Car-Assembly Industrial Environment’.
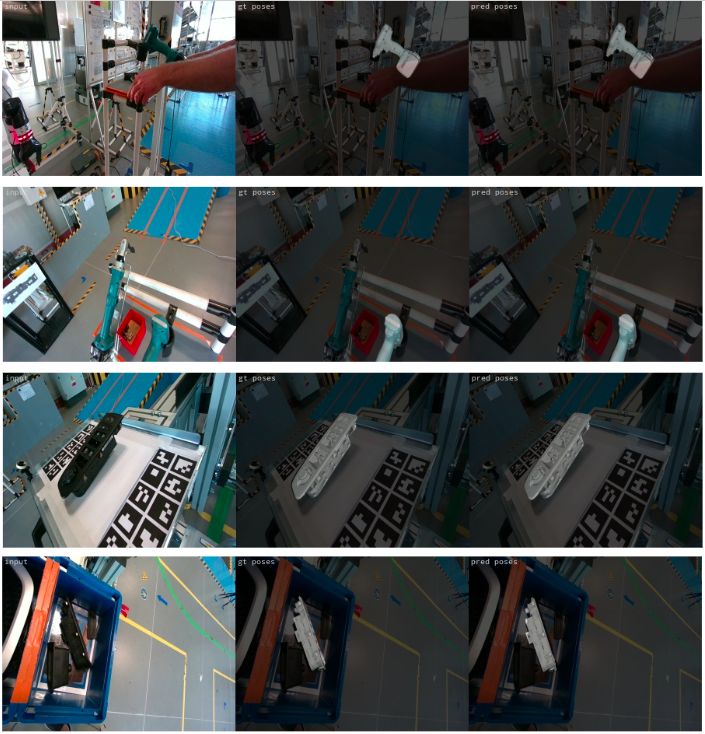
In this work, a visual object detection and localization workflow integrated into a robotic platform is presented for the single-view 6D pose estimation of objects with challenging characteristics in terms of weak texture, surface properties and symmetries. The objects of interest aim to support robot grasping in the context of human–robot collaboration during car door assembly in industrial manufacturing environments. For the purpose of this specific application, two different datasets were collected and annotated for training a learning-based method, one acquired in controlled laboratory conditions and the second in the actual indoor industrial environment. Different models were trained based on the individual datasets and a combination of them, managing to estimate accurate object 6D poses for all cases of both simpler and complex scenes, occluded objects and illumination changes. The evaluation was performed on a number of test sequences from the actual industrial environment, demonstrating the potential of the presented method in relevant industrial applications.
